 Correo Electrónico
Correo Electrónico
 DNINFOA - SIA
DNINFOA - SIA
 Bibliotecas
Bibliotecas
 Convocatorias
Convocatorias
 Identidad UNAL
Identidad UNAL





El desarrollo de este sistema es un avance del que se beneficiarán arquitectos, diseñadores, ingenieros, en sectores de la construcción, obra civil, cartografía y fabricación.
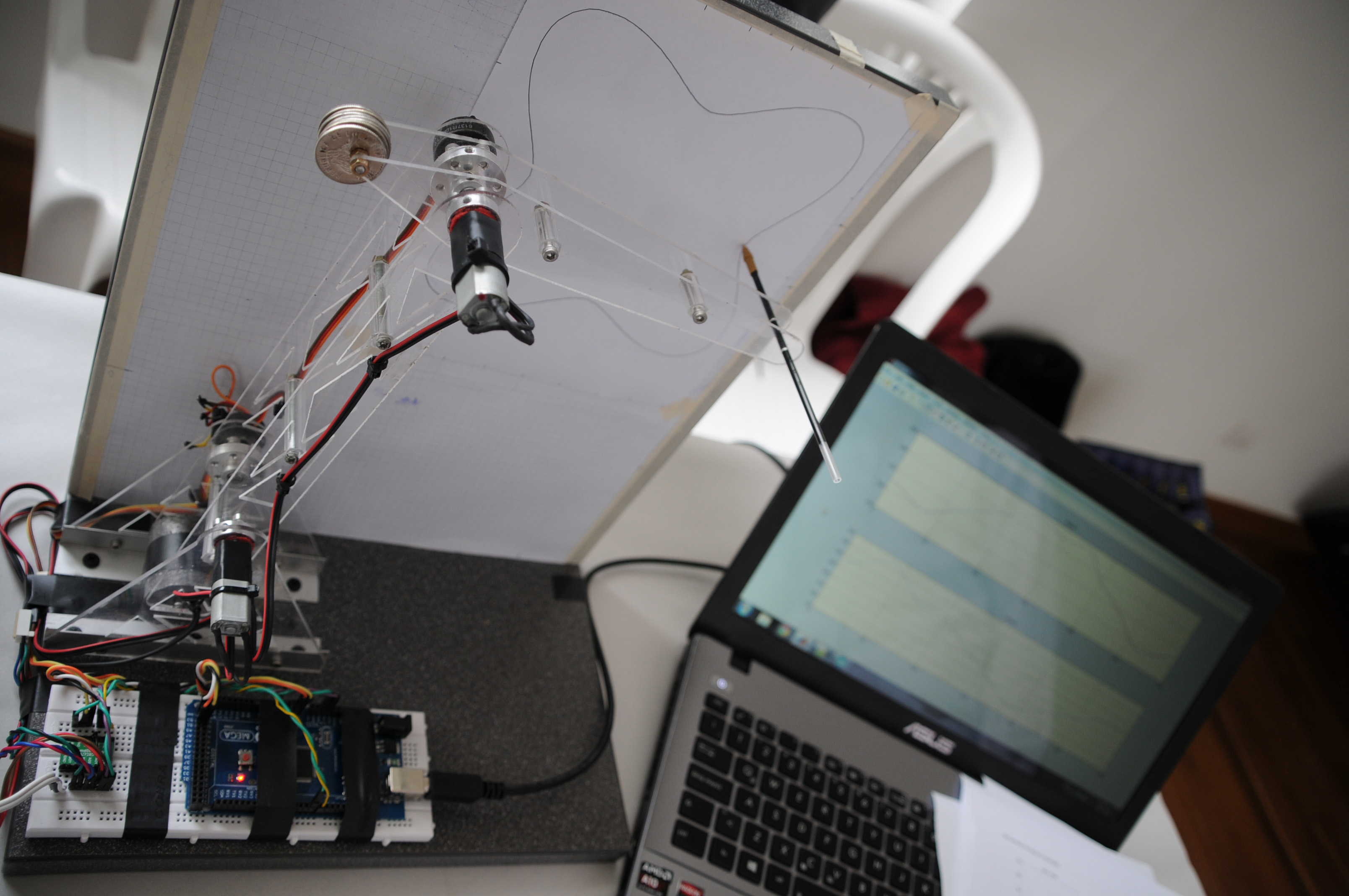
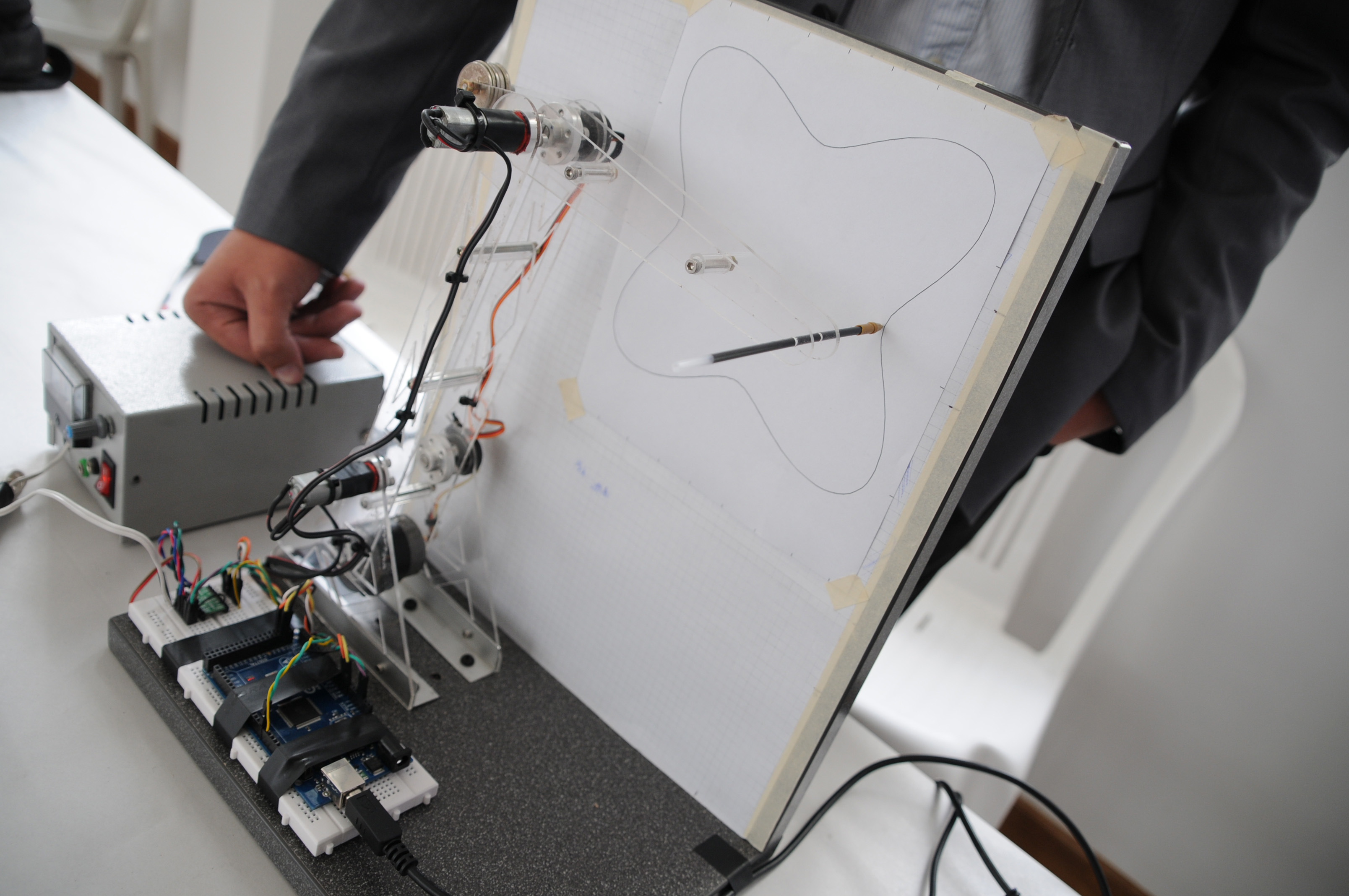
El robot permite dibujar planos a través de programas como el Autocad (software utilizado para dibujo y modelado), asegura uno de sus diseñadores Juan David Osorio, estudiante de Ingeniería Mecatrónica.
Las aplicaciones de dicho equipo son totalmente escalables, desde simples dibujos hasta trabajos industriales complejos. "Su desarrollo es una visión completa del diseño de un sistema para control de movimiento que garantiza trayectorias perfectas en planos verticales", afirma Osorio.
El proyecto elaboró todos los cálculos y dimensionamiento del motor para obtener un diseño mecánico que implementa programas, como el software matemático Mathlab, asimismo, el control es programado por medio de Arduino, plataforma electrónica de libre acceso, que permite el funcionamiento de un control que ordena las acciones.
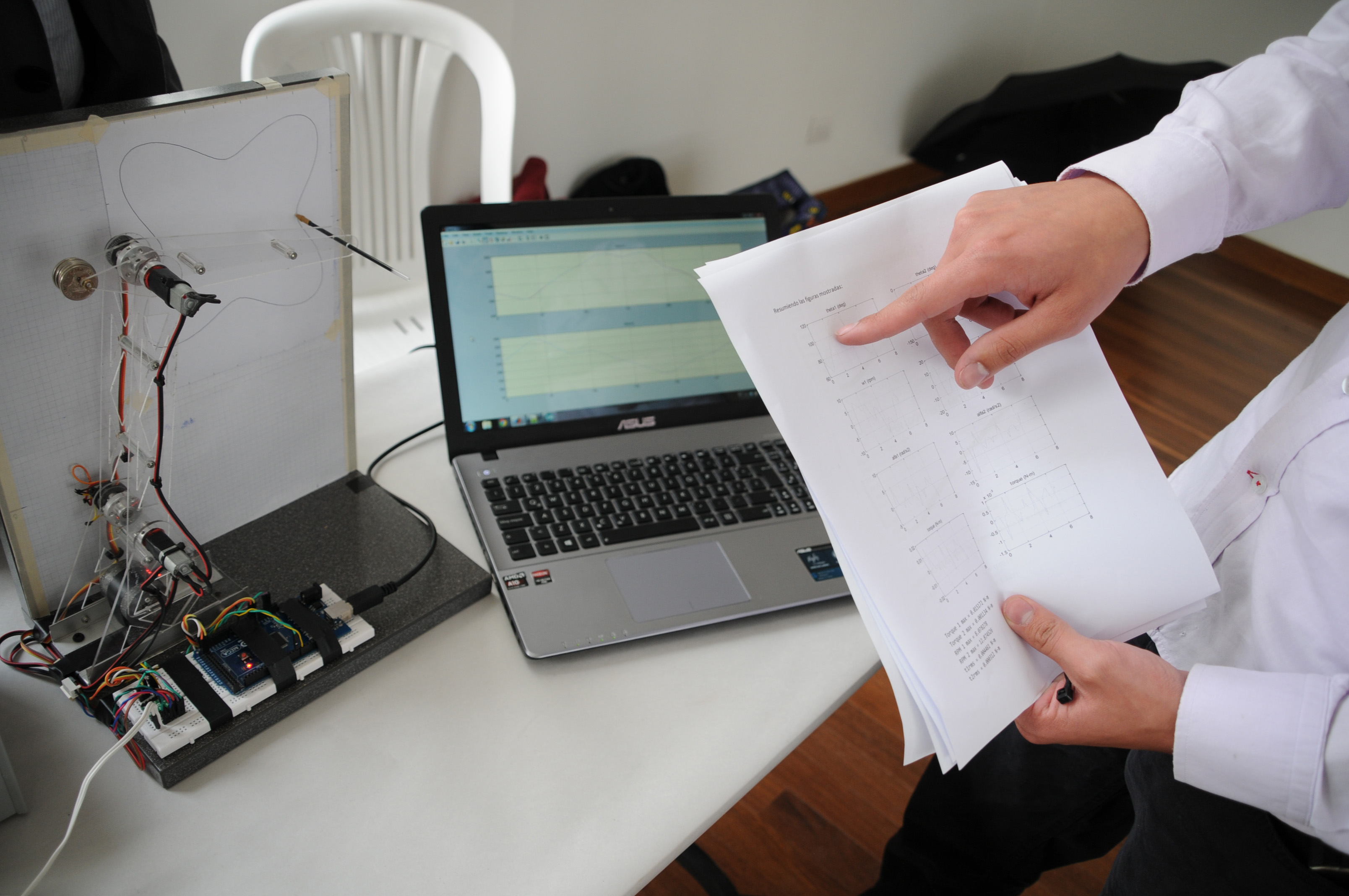
El grupo desarrollador se encontró con varios retos y algunas dificultades que lograron superar. Uno de ellos fue el cálculo de la cinemática inversa (cómo a través de trayectorias deseadas se pueden conocer las posiciones angulares de cada junta o articulación del robot), para lograr el buen dimensionamiento de los motores.
Osorio explica que a través de la cinemática inversa se obtuvo el perfil de posición angular que debe seguir cada uno de sus dos motores. "El objetivo es que el seguimiento sea perfecto, que la diferencia entre lo deseado y lo obtenido sea de error 0", asegura. Asimismo, agrega que con este desarrollo se garantiza que el sistema llegue a los puntos indicados en el tiempo preciso.
Existen diferentes tipos de juntas, en este caso el robot cuenta con dos rotacionales, de ahí la prioridad de calcular los ángulos necesarios y tiempos deseados de la trayectoria.
Según el estudiante, las aplicaciones son totalmente escalables, desde simples dibujos hasta trabajos industriales complejos, de la misma manera el diseño del robot también es escalable.
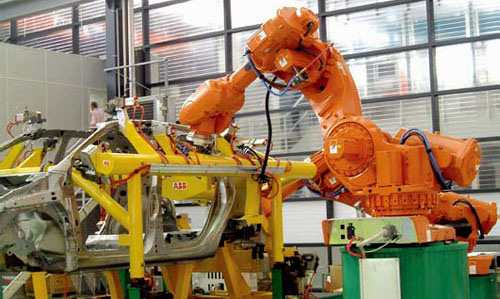
En la industria se utilizan brazos robóticos con varios grados de libertad, empleados para procesos de soldadura, posicionamiento de piezas, ensamble, transporte, entre otros.
En este caso, la novedad de este sistema con dos grados de libertad (juntas rotacionales), se basa en la implementación de un control no solo feedback o de retroalimentación, sino que además se le sumó una estructura de tipo feedforward o respuesta predictiva, la cual puede predecir qué voltajes se deben aplicar al sistema para que el robot tenga un movimiento correcto.
El proyecto fue una de las propuestas de Expoideas, evento que reúne proyectos e iniciativas de negocio de las diferentes facultades de la U.N. En su octava versión, más de 50 proyectos se presentaron a la sociedad convirtiéndose en el año de mayor participación.