 Correo Electrónico
Correo Electrónico
 DNINFOA - SIA
DNINFOA - SIA
 Bibliotecas
Bibliotecas
 Convocatorias
Convocatorias
 Identidad UNAL
Identidad UNAL







Juan Felipe Rodríguez, magíster en Ingeniería Automatización Industrial de la Universidad Nacional de Colombia (UNAL), afirma que al evaluar el robot "que simula una silla de dos ruedas" se obtuvo una mayor eficiencia en el desempeño de las dos ruedas-guía delanteras o giratorias, a partir de una serie de circuitos implementados en estas.
"Los controladores proporcional integral generalizado (GPI), sistema hecho a partir de un modelo matemático, provén una herramienta efectiva para rechazar las perturbaciones que se presenten en el camino, como piedras, dando mayor estabilidad y desempeño a las dos ruedas delanteras", comenta.
Para el investigador este avance es importante porque "estas dos ruedas inciden en el movimiento de una manera negativa, es decir que si el usuario gira a la derecha estas giran hacia la izquierda, una acción que entorpece la tarea de las ruedas traseras o propulsoras que se destacan por tener un mayor tamaño y que resultan pesadas al manipularlas".
A esta dificultad se suma la pésima infraestructura de las vías, en las que la persona tiene que ejercer una fuerza mayor en las ruedas posteriores cuando estas quedan atascadas.
"Para ajustar la dirección y la velocidad de desplazamiento durante el recorrido, el usuario tiene que superar los desafíos provistos tanto por los terrenos irregulares como por las ruedas-guía", indica.
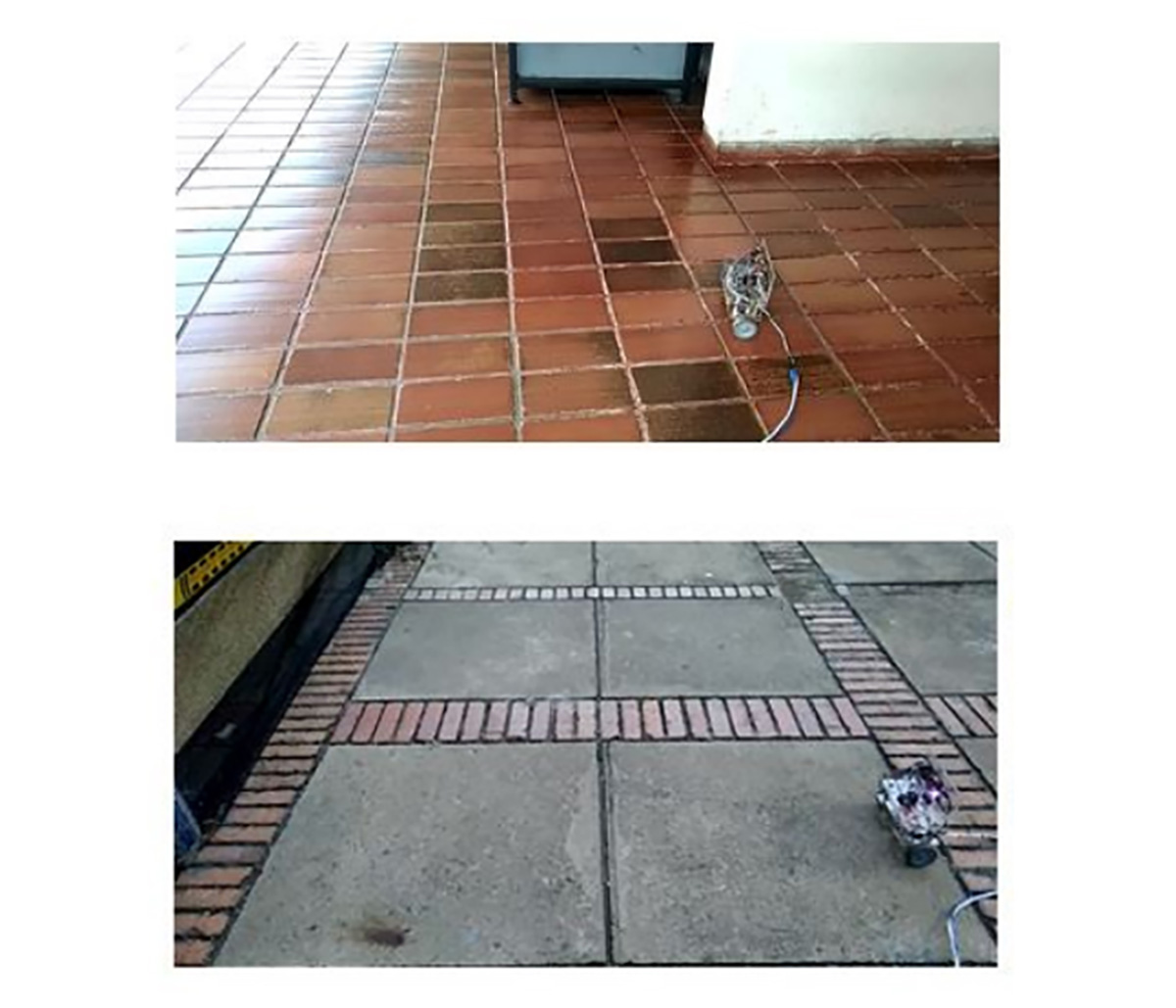
El controlador GPI presentó el mejor desempeño durante los experimentos de seguimiento de trayectorias, variación de parámetros y rechazo de perturbaciones presentes en superficies lisas con desniveles entre cada baldosa, en placas de concreto y pequeñas piedras que actúan como obstáculos.
"El robot que diseñamos es un primer experimento para comprobar técnicas de control. Pasamos el prototipo por diferentes superficies tanto lisas como rugosas, y también hicimos un seguimiento de trayectoria de velocidad en la que buscamos que al frenar la persona no sufra cambios en la velocidad para evitar cambios en la estabilidad o caídas", explica.
Al partir de posición vertical, el controlador equilibra el robot en menos de tres segundos y rechaza rápidamente las perturbaciones de los terrenos surcados permitiendo que el vehículo realice un buen seguimiento de la referencia de velocidad en ambos terrenos.
"Después de superar desniveles en superficie lisa y grietas en una superficie rugosa, se observó que el prototipo alcanzó equilibrio dinámico en un tiempo aproximado de un segundo", explica.
Además de los controladores GPI, se comparó el desempeño de otros controladores en trayectorias rectilíneas y curvas mientras se mantenía en equilibrio. Sin embargo el investigador aclara que "es pertinente que el controlador seleccionado se evalúe en un modelo a escala real y con pacientes".
Según cifras del Ministerio de Salud y Protección Social, en Colombia el 34,5 % de la población con discapacidad padece de movilidad reducida, parcial o completa del cuerpo, manos, brazos y piernas, lo cual llevó al magíster a desarrollar controladores que mejorarían la movilidad, y de paso la calidad de vida de estas personas.