 Correo Electrónico
Correo Electrónico
 DNINFOA - SIA
DNINFOA - SIA
 Bibliotecas
Bibliotecas
 Convocatorias
Convocatorias
 Identidad UNAL
Identidad UNAL
Sedes



Aprendizaje artificial: así enseñan a los robots a “caminar” como los humanos

El investigador empleó una estrategia de entrenamiento de robots que utiliza técnicas de aprendizaje artificial para hacer que caminen mejor. Foto: Costfoto/NurPhoto AFP.

En el estudio se emplearon dos robots humanoides para hacer el experimento. Foto: David Reinerio Yanguas Rojas, doctor en Ingeniería Mecánica y Mecatrónica de la UNAL.

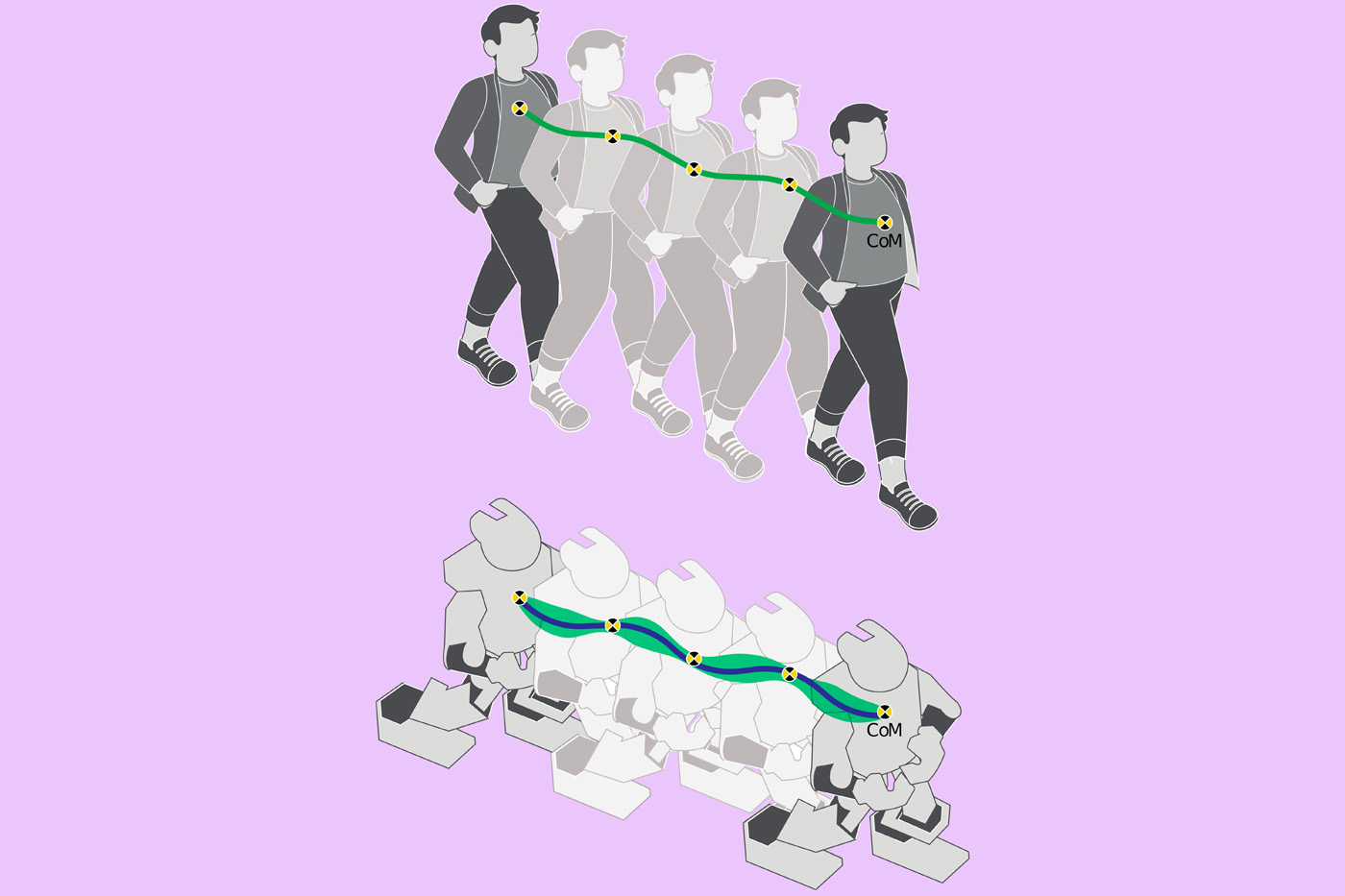
Con datos de la captura del movimiento de personas caminando se enseñó a los robots a moverse de manera similar. Foto: Nicol Torres, Unimedios.

Darwin mide 27 cm y Maxe 2 mide 40 cm. Foto: David Reinerio Yanguas Rojas, doctor en Ingeniería Mecánica y Mecatrónica de la UNAL.
Los robots pudieron caminar cada vez mejor hasta llegar a un comportamiento optimizado. Foto: David Reinerio Yanguas Rojas, doctor en Ingeniería Mecánica y Mecatrónica de la UNAL.
Desde que era un niño, David Reinerio Yanguas Rojas, doctor en Ingeniería Mecánica y Mecatrónica de la UNAL, sentía fascinación por los robots que veía en caricaturas y películas de ciencia ficción. Con el tiempo, esta pasión lo llevó a estudiar Ingeniería Mecatrónica, y eventualmente a profundizar en la robótica desde diversas perspectivas.
Hoy sus investigaciones apuntan a que los robots humanoides puedan realizar tareas tan complejas como caminar de manera estable, y uno de sus anhelos a futuro es lograr que compitan en deportes como el tenis de mesa, por ejemplo.
Mediante procesos de simulación, los ingenieros suelen crear modelos virtuales de robots para experimentar en ellos, optimizarlos y evaluar su rendimiento antes de construir un prototipo físico. El problema es que los resultados de una simulación no son idénticos a los de un entorno real.
“A esas diferencias se les conoce como la ‘brecha de la realidad’, y esa fue la principal motivación de mi trabajo de investigación en el contexto de la robótica bípeda”, explica el doctor Yanguas.
Su estudio se enfocó en desarrollar algoritmos que les permitieran a los robots aprender de los movimientos humanos y mejorar su desempeño a través de pruebas y errores controlados. “Tomamos datos de cómo caminamos los humanos y les enseñamos a los robots a imitar esos movimientos. Luego, mediante técnicas de aprendizaje por refuerzos, los robots van mejorando su habilidad para caminar sin caerse”, indica.
Para dar este gran paso en el entrenamiento de robots, el investigador trabajó con dos robots humanoides de bajo costo: Darwin, un modelo mini de 27 cm propiedad de la UNAL, y Maxe 2, un robot de 40 cm que él utilizó durante su pasantía doctoral en la Universidad de Quebec en Trois-Rivières, Canadá.
Al referirse a los movimientos, el ingeniero menciona el concepto de “grados de libertad”, que describe el número de movimientos independientes que puede realizar una articulación.
“Nosotros los humanos, con una estatura promedio de 1,75, tenemos 58 grados de libertad. Por ejemplo, el hombro tiene 3 porque puede realizar movimientos en tres direcciones distintas. En los robots este número es más reducido; Darwin tiene 16 en total y Maxe 2 tiene 17”, explica.
El ingeniero utilizó la robótica clásica como punto de partida para aplicar técnicas y principios establecidos en el campo, creando una “plantilla” básica que guiara a los robots en su forma de caminar. Mediante cálculos matemáticos y modelos logró que estos mantuvieran el equilibrio mientras se desplazaban.
En una segunda fase, denominada “aprendizaje por imitación”, empleó datos de captura de movimiento de humanos caminando para enseñarles a los robots a moverse de manera similar. Sin embargo, debido a las diferencias en tamaño y forma entre humanos y robots, estos movimientos se tuvieron que ajustar para evitar caídas.
El siguiente paso fue aplicar el “aprendizaje por refuerzo”, que permitió mejorar las habilidades de los robots a través de la experiencia. Esto quiere decir que como el robot ya tenía una idea básica de cómo caminar, gracias a la imitación, el ingeniero hizo que los robots realizaran pruebas para ajustar y mejorar su técnica de caminar.
“La última parte fue la integración de los pilares para conseguir los mejores resultados; esta fase es especialmente crítica ante la brecha de la realidad, aprendizaje por refuerzo e integración de estos enfoques”, comenta.
Al implementar este componente final logró que los robots no solo caminaran en simulación, sino también en el mundo real, reduciendo la “brecha de la realidad” que les preocupa a los investigadores en este campo.
“Los robots fueron capaces de caminar cada vez mejor hasta llegar a un comportamiento optimizado, es decir que se movieron rápido, gastando la menor cantidad de energía posible”, detalla el egresado de la UNAL.
Aclara además que los resultados obtenidos en este estudio se podrían emplear para que los robots realicen actividades más complejas, como por ejemplo correr en una pista de obstáculos.